


Swipe or use ‹ › · tap to expand · drawings are dimensioned (typical)
QDD Actuator Starter Kit
Best sellerPre-matched, bench-tested motor + ODrive driver + AS5047P encoder + magnet — build your first robot joint without the compatibility guesswork.
What's in the kit
Specs
| Motor | Gimbal BLDC ~Ø58, ~11 pole pairs |
| Driver | ODrive-compatible (odrivetool) |
| Encoder | AS5047P, 14-bit SPI, 16384 CPR |
| Recommended V | 24 V (24–56 V) |
| Control | Torque / velocity / position (FOC) |
| Warranty | 6-month on electronics |
QDD Actuator Starter Kit — Build Your First Robot Joint
A pre-matched, bench-tested motor + driver + encoder kit for building a quasi-direct-drive
actuator — the kind of joint inside modern legged robots and dynamic arms. No guesswork about
compatibility. Ships from the US, with a step-by-step setup guide.
From PlanetaryDriver — curated and tested by people who actually build these.
Who this is for
You want to build your own QDD actuator — a high-torque, backdrivable robot joint — for a
quadruped, biped, robot arm, or balancing robot. You know your way around electronics and want
parts that just work together, not a weekend lost to mismatched pole pairs and encoder
protocols.
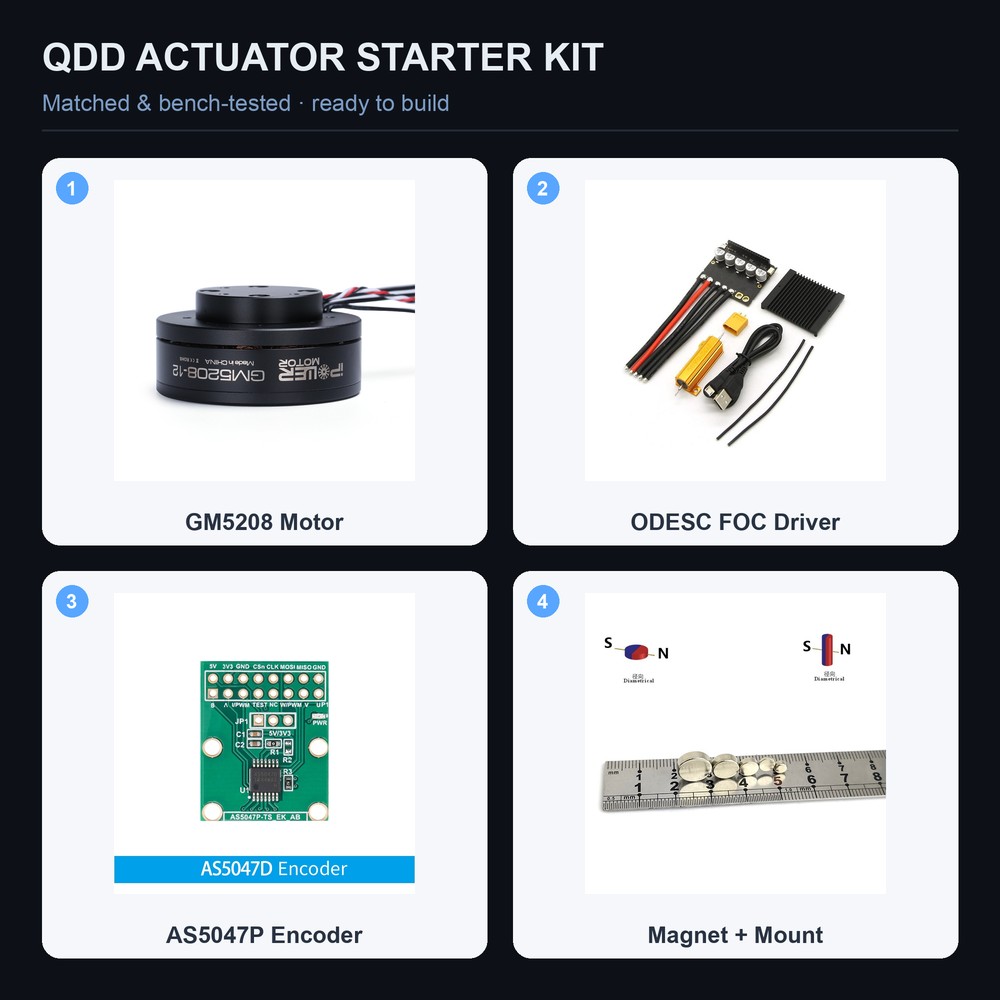
What's in the box
- 1× pancake gimbal BLDC motor (GM5208-class) — flat, high-torque-density, ideal for QDD
- 1× ODrive-compatible FOC driver (runs stock
odrivetool) — closed-loop torque/velocity/position - 1× AS5047P magnetic encoder board — 14-bit absolute, SPI (the protocol ODrive expects)
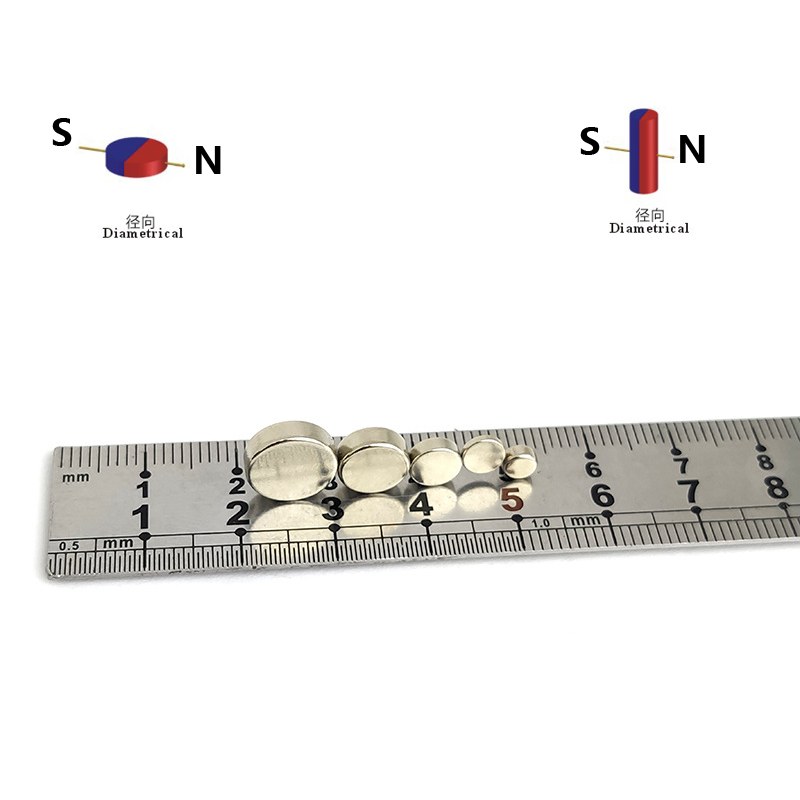
- 1× diametric magnet + encoder mount — correctly sized and positioned
- Hookup wiring + connectors
- Free step-by-step setup & tuning guide (mechanical → wiring → calibration → tuning)
Why this kit (and not loose parts from AliExpress)
| Loose parts | This kit | |
|---|---|---|
| Compatibility | You gamble on pole pairs, winding, encoder protocol | ✅ Verified to work together |
| Encoder match | SPI vs ABZ vs I²C confusion | ✅ AS5047P SPI — natively supported by ODrive |
| Motor type | Gimbal winding needs special driver mode (most people miss this) | ✅ Pre-configured settings provided |
| Shipping | 3–6 weeks + customs + duty surprises | ✅ Ships from the US in 1–2 days |
| Support | You're on your own | ✅ Real FOC/CAN help + a written guide |
| DOA / returns | Disputes with an anonymous seller | ✅ We test before shipping; easy returns |
Specs (typical — confirm on listing)
| Spec | Value |
|---|---|
| Motor | Gimbal BLDC, ~Ø58 "pancake," ~11 pole pairs |
| Recommended voltage | 24 V (driver supports 24–56 V) |
| Encoder | AS5047P, 14-bit absolute, SPI, 16384 CPR |
| Control | Torque / velocity / position (FOC, closed-loop) |
| Interfaces | USB, UART, CAN, PWM |
| Firmware | Stock ODrive 3.6 (odrivetool) |
What you can build
DIY robot-dog and biped legs · low-gear-ratio "direct-drive-ish" joints · backdrivable robot-arm
axes · reaction wheels and balancing bots · haptic devices and force-feedback rigs.
Included guide
Every kit links to Build & Tune Your First FOC Actuator —
mechanical assembly, wiring, ODrive calibration, and PID tuning, with the exact config values for
this motor (including the gimbal-mode setting most first-timers get wrong).
FAQ
Do I need a separate power supply? Yes — a 24 V bench supply (≥3–5 A to start). We sell one
separately, or use any quality lab supply.
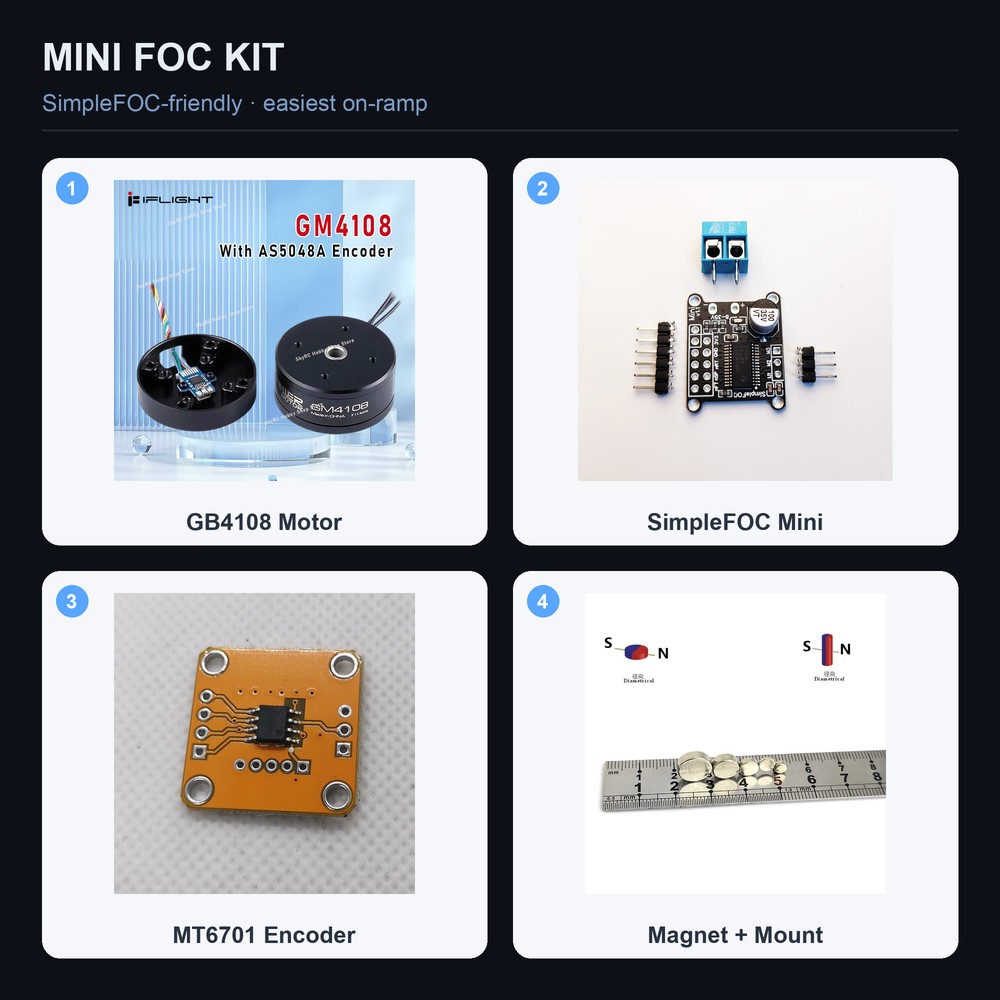
Can I use this with SimpleFOC / Arduino instead of ODrive? The driver is ODrive-firmware based,
so the smoothest path is odrivetool. If you prefer Arduino/SimpleFOC, look at our Mini FOC
Kit, which is built around a SimpleFOC-friendly driver.
What gear ratio? This is the motor/driver/encoder core. Add a 6:1–10:1 planetary or cycloidal
stage for a true QDD actuator — see the guide for recommendations.
Is it plug-and-play? It's plug-and-tune. The parts are matched and pre-configured; you'll
still run a one-time calibration (the guide walks you through it in ~20 minutes).
Shipping, warranty & support
- Ships from the US, typically 1–2 business days.
- 30-day returns, 6-month warranty on the electronics.
- Email/Discord support from people who build these — not a call center.
Pair it with
- Mini FOC Kit — smaller motor + SimpleFOC driver, for Arduino users / first-timers
- Spare AS5047P encoder + magnet
- 24 V bench power supply
- Planetary gearbox stage (6:1) — turn this core into a full QDD actuator